Precise and responsive
We are committed to developing technologies that allow all customers to drive safely, securely, comfortably, enjoyably, and with confidence, regardless of road conditions or weather.
Development team's philosophy
Soul of AWC
Mitsubishi Motors engineers are driven by a deep desire to ensure that, even in harsh driving conditions, no driver or passenger is injured or loses their life in an accident.
At the core of their work is a strong belief that everyone should be able to move freely and enjoy life without hesitation or fear due to driving difficulties.

Concept of development
AWCAll Wheel Control
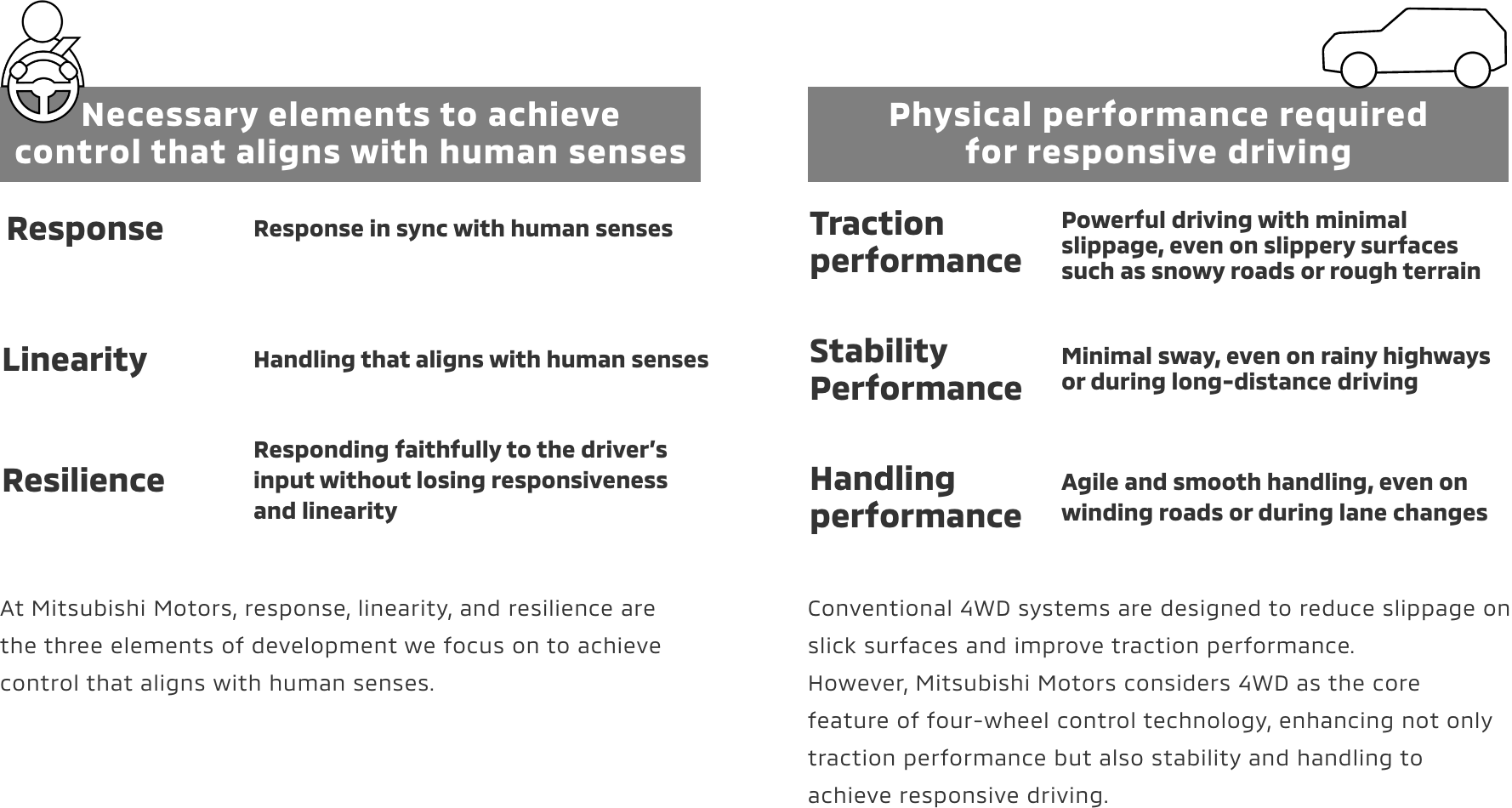
Mitsubishi Motors' AWC development concept is about maximizing the balanced performance of all four tires to achieve precise and responsive handling and outstanding stability. The goal of AWC precise and responsive handling is for the vehicle to move exactly as the driver intends in any conditions. Outstanding stability means the vehicle's motion remains stable in any conditions, allowing the driver to concentrate on the road and drive with peace of mind.
History
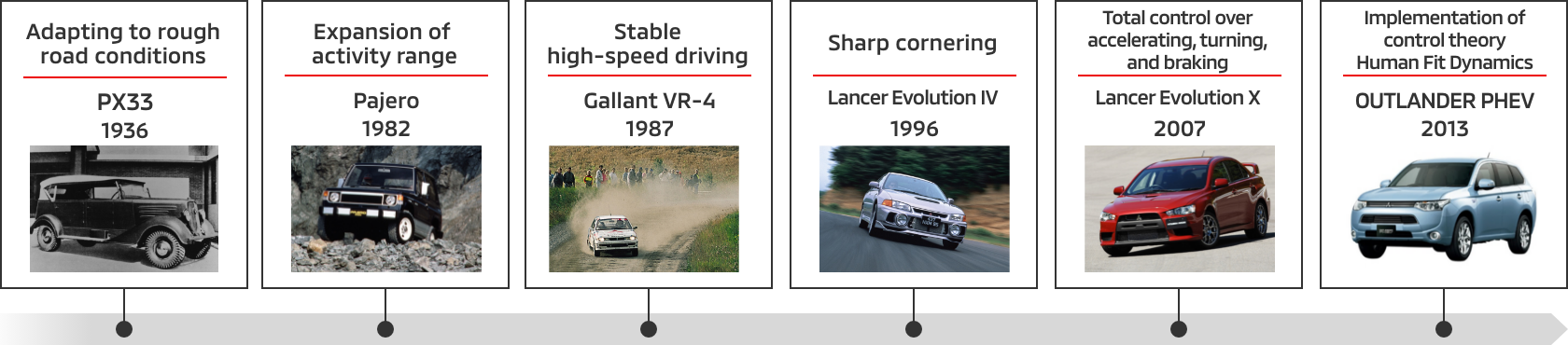
Our development of All Wheel Control technology, which began with the PX33, has evolved through continuous improvement. With the move toward electrification, we have now achieved the implementation of control theory.
The foundation of AWC development
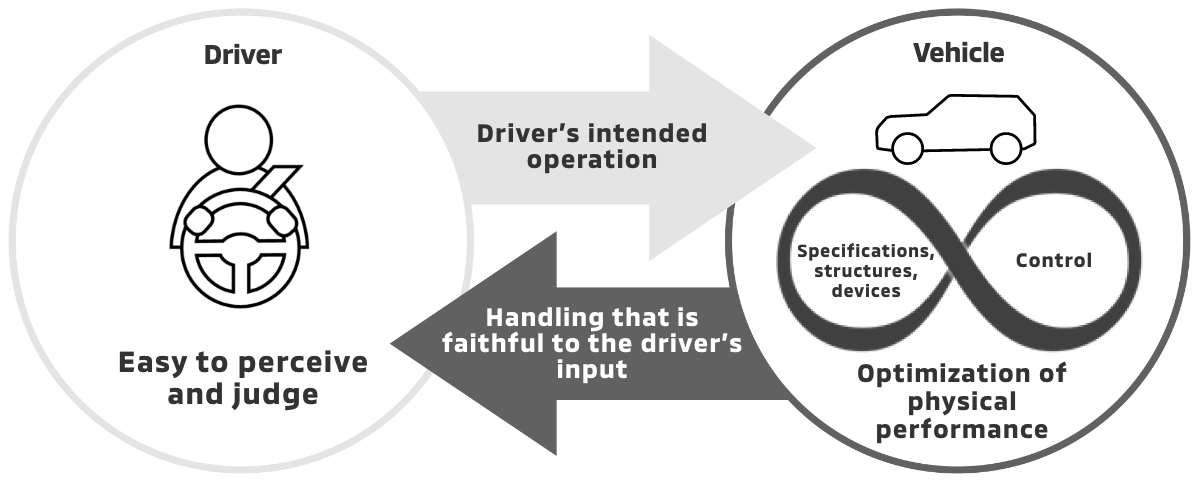
Aligning control with human perception, judgment, and operation
In the 1980s, Mitsubishi Motors' Technical Review No.1 emphasized not only enhancing the physical driving performance of cars but also the importance of research on communication between the vehicle and the driver as well as control systems that align with human senses. Achieving precise and responsive handling requires optimizing the vehicle's performance according to human response—involving perception, judgment, and operation during driving. This concept has remained the foundation of All Wheel Control technology ever since.
Key points of development
S-AWCSuper All Wheel Control
World-class technology
Among Mitsubishi Motors' various 4WD systems, the S-AWC is an integrated vehicle dynamics control system that embodies the AWC concept at a high level.

S-AWC is composed of three subsystems: Longitudinal torque distribution, Lateral torque vectoring, and 4-wheel braking force. It enables the integrated control of the vehicle's accelerating, turning, and braking movements seamlessly and continuously without discomfort to the driver, significantly improving both handling and stability.
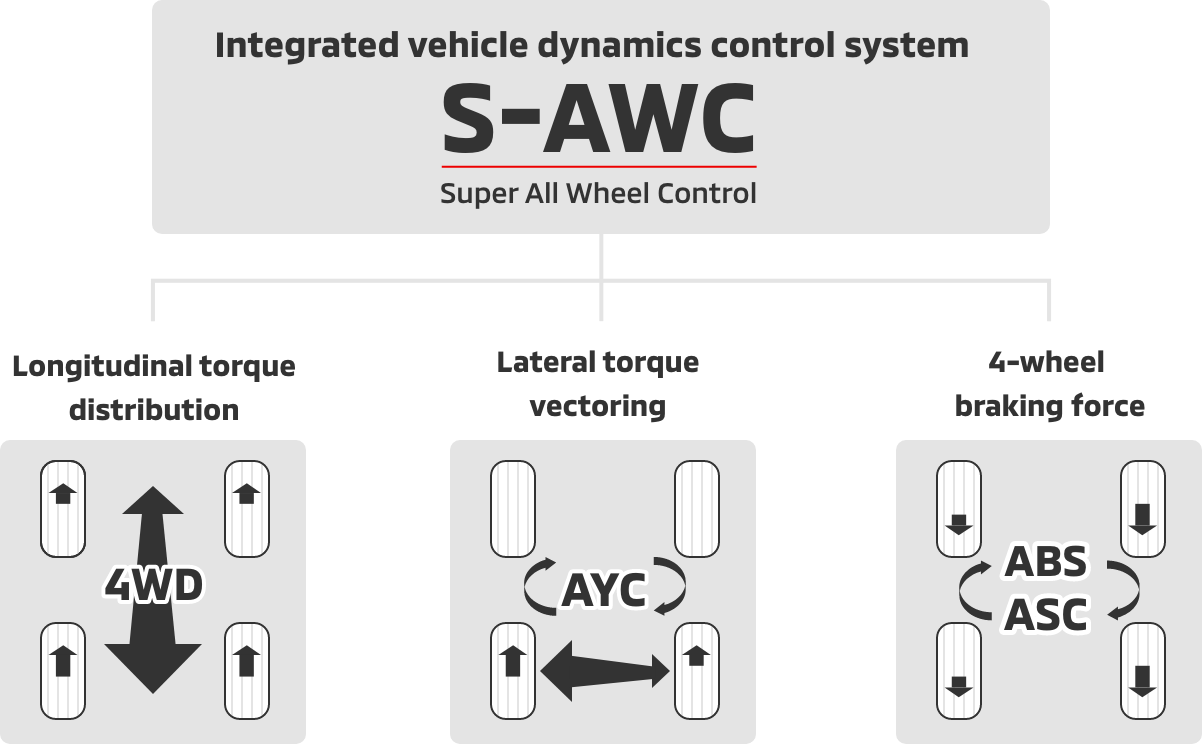
AYC:Active Yaw Control
ABS:Anti-lock Brake System
ASC:Active Stability Control
Implementation of theory
Evolution of S-AWC through electrification
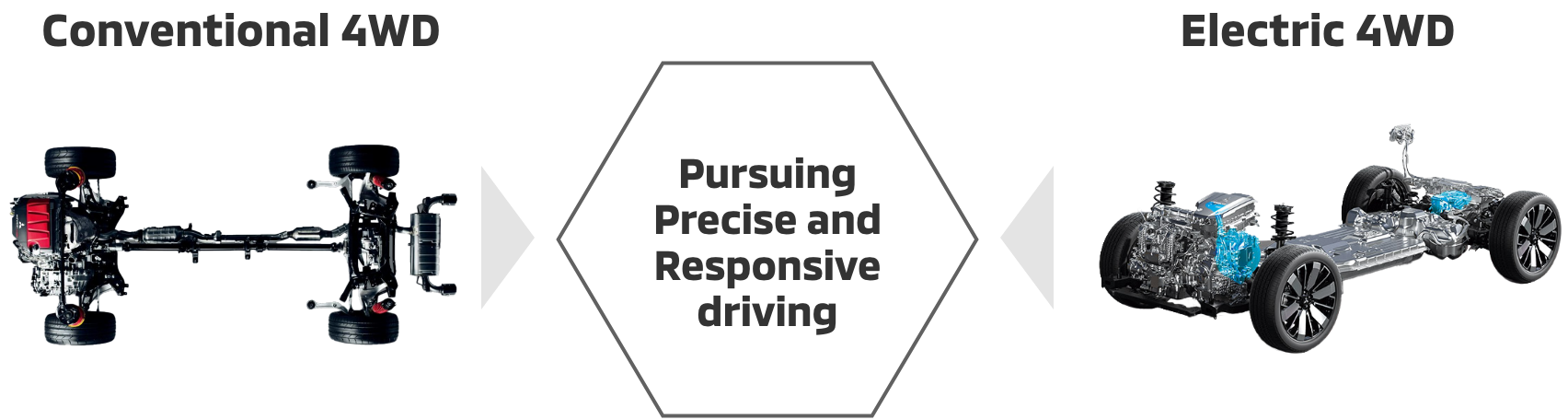
To improve performance of the S-AWC system, Mitsubishi Motors incorporated electrification technologies, mounting motors on both the front and rear axles to allow independent control. This twin-motor 4WD system enables free and flexible front-rear driving force distribution control.

Twin-motor 4WD system which no longer requires a propeller shaft that mechanically connects the front and rear wheels, can freely control the longitudinal torque distribution from 100:0 to 0:100. This flexible feature achieved the ideal longitudinal torque distribution our engineers had been pursuing since the 1980s, resulting in significant improvements in both handling and running performance.
On the other hand, conventional 4WD systems, with front and rear wheels physically connected, contributed to improved straight-line stability. At Mitsubishi Motors, while focusing on these characteristics, we aim to develop vehicles that move exactly as the driver envisions under all conditions.