



レーシングドライバー/モータージャーナリスト
中谷明彦氏
四輪のタイヤ能力をバランスよく最大限に引き出し、「意のままの操縦性」と「卓越した安定性」を追求する。それが、三菱自動車の掲げる開発思想、オールホイールコントロール(以下、AWC)です。目指したのは、あらゆる状況でドライバーがイメージした通りにクルマが動くこと。そして、どのような状況でもクルマの挙動が安定し、安心して運転に集中できること。三菱自動車はこのAWC思想に基づいて四輪制御技術を磨き上げてきました。その成果として生まれた車両運動統合制御システムS-AWC(スーパーオールホイールコントロール)は、『ランサーエボリューションⅩ』に初めて搭載され、三菱自動車を代表する機能装備となりました。『アウトランダーPHEV』にも搭載されているS-AWCは、クルマの「走る」「曲がる」「止まる」といった基本動作を、 シームレスに統合制御することで、ドライバーにとって自然で違和感のない運動性能を実現します。それではなぜ三菱自動車はこれほどまでに四輪制御技術にこだわり続けてきたのでしょうか。そして、どのようにしてS-AWC にたどり着いたのでしょうか。レーシングドライバーとして『ランサーエボリューション』シリーズの開発に携わり、現在はモータージャーナリストとして活躍する中谷明彦氏とともに、三菱自動車の四輪制御技術の進化の歩みを紐解きます。
誰でもどんな道でも意のままに走れる4WD技術を目指して
三菱自動車の現在まで続く4WD技術の歴史は、1953年に始まった『三菱ジープ』のノックダウン生産にまでさかのぼります。『三菱ジープ』に採用されていた「パートタイム4WD」は、通常は2WDで走行し、滑りやすい悪路やオフロードでのみ4WDに切り替えるシンプルな仕組みでした。

三菱自動車4WD技術のルーツとなった『三菱ジープ』(1953年)
1980年には、『三菱ジープ』の生産・改良開発で培った経験をもとに、独自開発したパートタイム4WDを1トンピックアップトラック『フォルテ』に、続く1982年には『パジェロ』に搭載し、三菱自動車の4WDの礎となりましたが、当時の4WDは、悪路でのトラクション性能に優れていた一方で、乾燥舗装路ではタイトコーナーブレーキング現象※1が生じるなど、操縦性や日常での快適性に改善の余地がありました。さらに1986年には、センターディファレンシャルギヤを組み込んだフルタイム4WDを開発し、トラクション性能を発揮させながら、課題であった乾燥舗装路での走行性能を両立。この技術は『ミラージュワゴン』/『ランサーワゴン』に搭載され、4WDが乗用車にも広がるきっかけとなりました。そして1987年発売の『ギャランVR-4』で4WD、4WS(4輪操舵)などからなる総合システムACTIVE FOURを搭載。AWC思想の原点として、三菱自動車の4WD開発における新たな基準を打ち出し、以降の進化を方向づけるものとなりました。
-
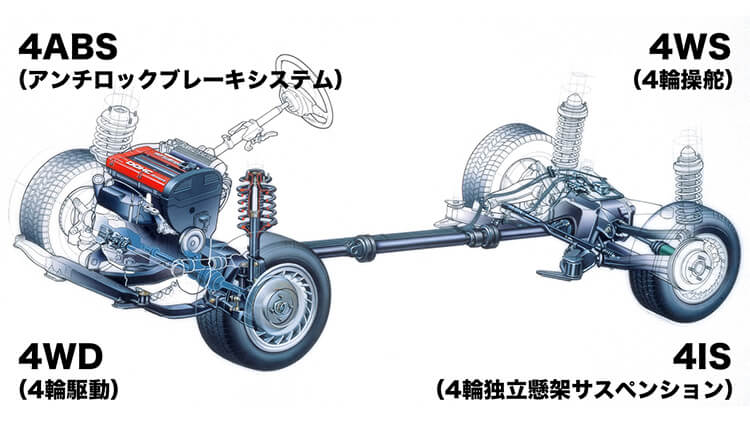
4WD、4WS、4ABS、4ISなどから構成される統合システムACTIVE FOUR
-

ACTIVE FOURを搭載したギャランVR-4(1987年)
レースで勝てるクルマを目指して
中谷氏が開発に携わったのは、WRC(世界ラリー選手権)をはじめ、国内外のラリーなどのモータースポーツ競技で『ランサーエボリューションⅣ』が活躍していた1996年当時のことです。そのラリー車のベースとなる市販車(GSRグレード)に搭載されていたのが、AYC(アクティブヨーコントロール)でした。この技術は、従来の左右に回転差を調整するだけのディファレンシャルギヤとは異なり、左右輪間に駆動力差を発生させ、コーナー外側のタイヤに多くの力を伝えることで、旋回性能を向上させる画期的なものでした。
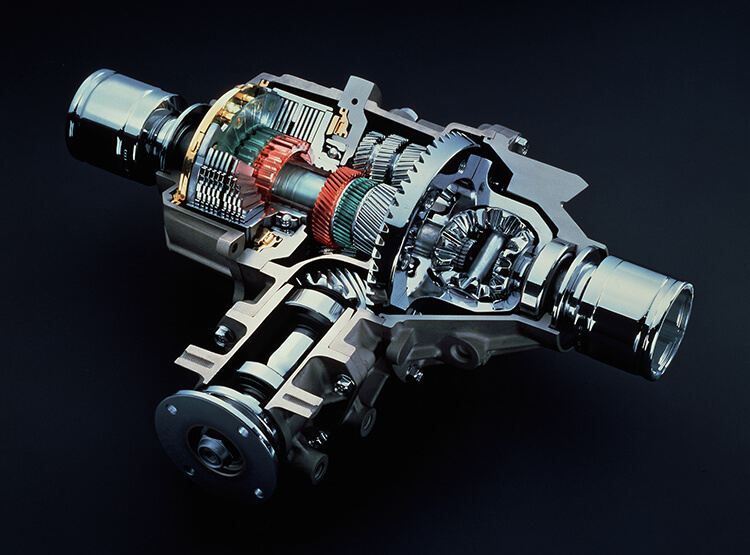
『ランサーエボリューションⅣ』に搭載されたAYC
「コンセプトが非常に斬新で、期待値以上に曲がれる感覚に感銘を受けたのを覚えています。革新的な技術でした」と中谷氏は振り返ります。「後輪左右の駆動力を変化させることで、トラクションを活かしつつコーナリング性能を大幅に向上させることができたのです」と解説してくれました。前輪駆動ベースの4WDはフロントにエンジンやトランスミッションなどの重量物が集中するため前後重量バランスが取りにくく旋回性能に難があり、その対策が求められていたのです。AYCは前輪への負担を軽減し旋回性を向上させるなど、四輪制御技術を新たな領域に引き上げました。
一方で中谷氏は「市販車の技術としては優れていても、モータースポーツで使用するには耐久性の面などで課題が多くありました」と当時の印象を話します。事実、AYCは『ランサーエボリューションⅣ』の競技ベース車である「RS」にはオプション設定されたものの、実際の競技では使われていませんでした。

初めてAYCを搭載した『ランサーエボリューションⅣ』GSR
1980年代、WRCでは後輪駆動から4WDが主流となり、またターマック(舗装路)のSS(スペシャルステージ)が増加し、オンロードでの走行性能の向上が求められるようになっていました。三菱自動車のラリーカーも後輪駆動の『ランサーEX』から4WDの『ギャランVR-4』へ、1990年代には『ランサーエボリューション』へと移り変わり、グラベル中心の参戦体制からターマックラリーにも積極的に参戦する姿勢へと変化していきました。「グラベル中心の設計思想では対応が難しくなってきたため、サーキットレースで培った経験をもとに、さまざまな改善点を提案しました。ラリーで培った知見や技術とは相容れない部分もありましたが、“レースで勝つクルマ”、また、その技術を生かした市販車造りを目指し、開発担当者と意見を交わしながら日々試行錯誤を重ねました」と、当時の挑戦を振り返ります。
その成果として、多くの改良が施された『ランサーエボリューションⅤ』は圧倒的な走行性能を発揮しました。筑波サーキットでは前モデルより大幅にラップタイムを更新し、雑誌企画のバトル対決でも次々と勝利を収めるなど、その速さと完成度は高く評価され、三菱自動車の四輪制御技術を象徴するモデルとなりました。

中谷氏が最初に開発に携わった『ランサーエボリューションⅤ』
ワイドトレッド化、ブレンボ製ブレーキなどを採用
AYCは三菱自動車が目指す「意のままの操縦性」と「卓越した安定性」の実現に向けて大きな武器となりました。その技術は、モータースポーツの場でさらに磨かれ、進化を遂げていきます。目指すのは、誰もがどんな道でも安心して運転できるクルマをお客様に届けること。中谷氏はモータースポーツを通じて開発に関わる立場として、そしてジャーナリストとして、その技術の進化を見届け続けます。
【中谷明彦】
大学在学中よりレーサー/モータージャーナリストとして活動。1985年に「ミラージュカップ」の開幕戦で優勝を果たし、プロ・レーサーに転向。同年には、グループA車両が熾烈な戦いを繰り広げた第1回インターTECに『三菱スタリオン』で参戦。1988年の全日本F3チャンピオン。レーシングドラーバーの見地からアドバイスを送り、『ランサーエボリューション』V〜Xの開発を陰で支えた。『ランサーエボリューション』を駆って、スーパー耐久レースで50勝を記録、5度の年間覇者となる。
- :パートタイム4WDにおいて、直結4WD状態で舗装路の小さなカーブを低速で回る時、前後輪の回転半径に差が出て、その差をタイヤのスリップでカバーできなくなるとブレーキがかかったような状態になる現象となること。