意のままに
どんな路面・天候でも、全てのお客様が安全・安心・快適に、そして自信を持って楽しく運転いただけるように四輪制御技術を追求しています。
開発者の想い
Soul of AWC
三菱自動車エンジニアの切なる想い。
それは、たとえ過酷な走行環境に遭遇しても、ドライバーや同乗者が事故によって怪我をしたり、命を落として欲しくない。そして、上手く運転できないことを理由に躊躇したり諦めることなく、自由に行動してより人生を楽しんでいただきたいという強い想いが根底にあります。

開発思想
AWCAll Wheel Control (オールホイールコントロール)
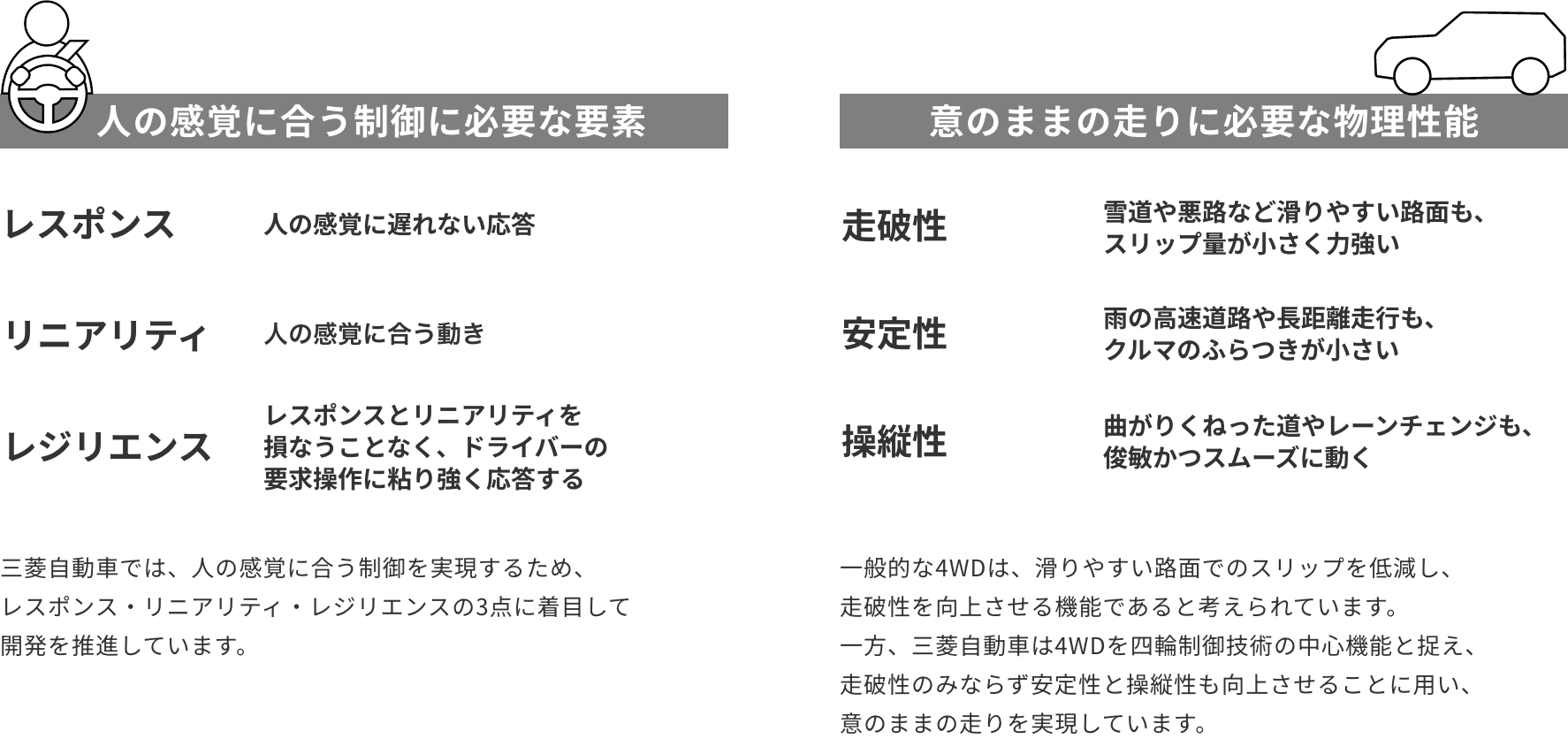
三菱自動車の四輪制御技術の開発思想「AWC」とは、四輪のタイヤ能力をバランスよく最大限に発揮させ、“意のままの操縦性”と“卓越した安定性”を実現するという三菱自動車の開発思想です。「AWC」が追求する「意のままの操縦性」とは、あらゆる状況においてドライバーがイメージした操作通りにクルマが動くということ。そして「卓越した安定性」とは、どのような状況でもクルマの挙動が安定し、安心して運転に集中できるということです。
開発の歴史
PX33から始まった四輪制御技術開発は、様々な改良によって進化させ続け、電動化技術を取り入れたことにより、制御理論の実現が可能となったのです。

制御開発の基礎
人の認知・判断・操作に制御を合わせる
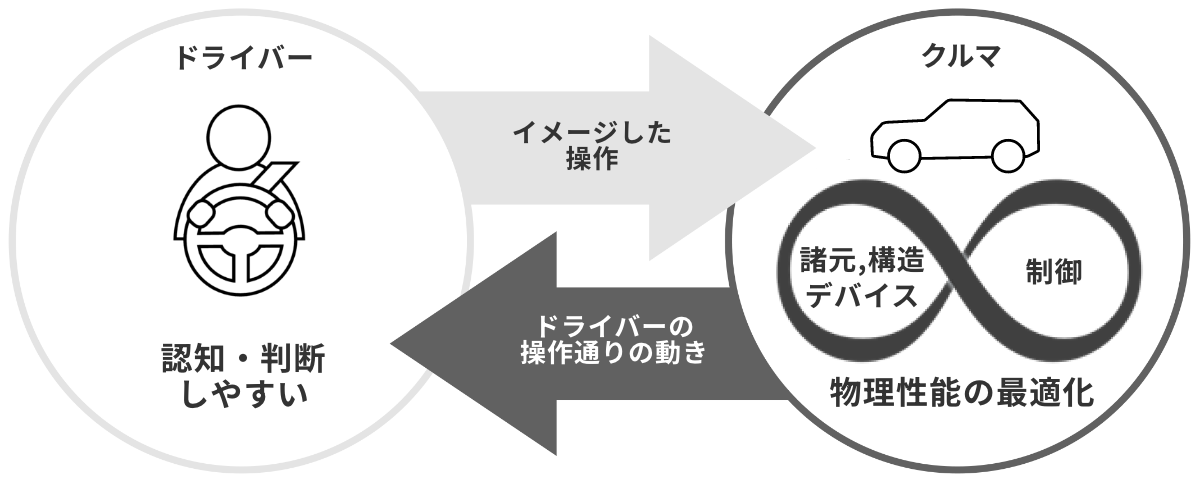
三菱自動車は、1980年代に発表したテクニカルレビュー No.1において、「クルマの物理的な運動性能を高めることだけでなく、クルマを運転する人間との意思の伝達、人間の感覚に合う制御の研究の重要性」について説き、「意のままの操縦性を実現するためには、人間の応答関数、つまり、運転時の人間の認知・判断・操作に合わせ、クルマの物理性能を最適に制御することが重要である」という考え方が、四輪制御技術の基礎として今日まで受け継がれています。
開発のポイント
S-AWCSuper All Wheel Control
世界最高峰のテクノロジー
三菱自動車が有する様々な4WDシステムの中で、AWC思想を高次元で具現化した代表的なシステム。
それが車両運動統合制御システム「S-AWC」です。

S-AWCは、前後輪間トルク配分・左右輪間トルクベクタリング・4輪ブレーキ力を制御する三つのサブシステムで構成され、「走る・曲がる・止まる」といった車両運動を、ドライバーにとって違和感がないように、継ぎ目なく連続的に統合制御することで、クルマの操縦性と安定性を飛躍的に向上させました。
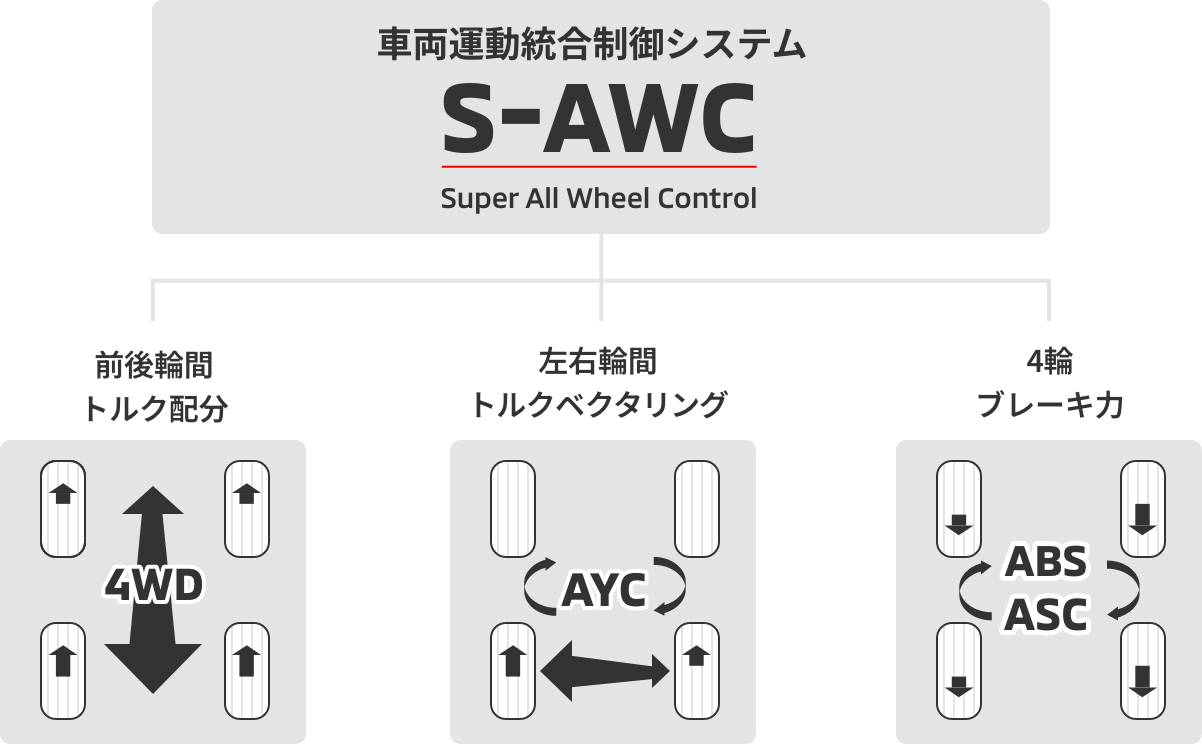
AYC:Active Yaw Control
ABS:Anti-lock Brake System
ASC:Active Stability Control
理論の実現
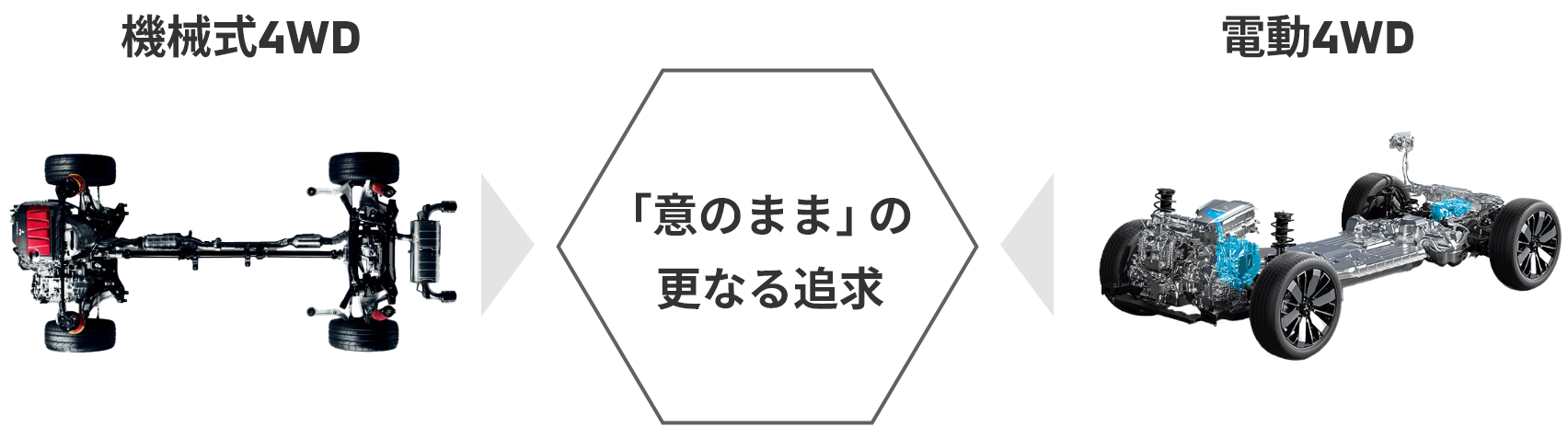
電動化技術によるS-AWCの進化
三菱自動車はS-AWCを進化させるため、電動化技術を取り入れ、前輪と後輪にそれぞれモーターを搭載し独立した制御が可能な「ツインモーター4WD」によって、自由自在の前後駆動力配分制御を手に入れました。

「ツインモーター4WD」は、プロペラシャフトによる物理的な拘束から解放されたことによって、前後駆動力配分を100:0 ~ 0:100 で制御することが可能です。この自由自在な特性は、1980年代以来追及してきた「理想前後駆動力配分」を実現し、操縦性と走破性をバランスよく飛躍的に進化させました。
一方で従来の4WDは、前後輪が物理的に繋がっていることにより、直進安定性の向上等にも寄与していました。
三菱自動車ではこれらの特性にも注目しながら、あらゆる状況下でドライバーのイメージ通りに動くクルマの実現を追求しています。