



Racing Driver & Automotive Journalist
Akihiko Nakaya
Extract the maximum performance from all four tires in a more balanced manner in the pursuit of precise handling and superior vehicle stability. That is the all wheel control (AWC) development concept that Mitsubishi Motors advocates. The aim is for the vehicle to move precisely as the driver intends in all types of driving conditions. It also means keeping the vehicle’s behavior stable in all conditions to enable the driver to focus on driving without any worries. Mitsubishi Motors has honed its four-wheel control technology based on this AWC concept.
The S-AWC (Super-All Wheel Control) integrated vehicle dynamics control system, born as a result of this concept, first went into the Lancer Evolution X. It eventually became the characteristic feature equipped in Mitsubishi Motors vehicles. The S-AWC, also featured on the Outlander PHEV, delivers maneuverability that seamlessly exercises integrated control over the basic vehicle movements of accelerating, cornering, and braking to make them feel natural and comfortable to the driver. Why then has Mitsubishi Motors remained this obsessed with four-wheel control technology? And what events led to them creating S-AWC? Together with Akihiko Nakaya, who was involved in the development of the Lancer Evolution series as a racing driver and who now works as an automotive journalist, we trace the evolutionary path of Mitsubishi Motors four-wheel control technology.
Pursuing 4WD technology that anyone can control with precision on any type of road
The history of Mitsubishi Motors 4WD technology leading up to today traces all the way back to knockdown production of the Mitsubishi Jeep, which began in 1953. The part-time 4WD employed in the Mitsubishi Jeep was a simple system that normally drives as a 2WD, and switches to 4WD when driving on slippery roads or off-road.

Mitsubishi Jeep (1953), the roots of Mitsubishi Motors 4WD technology.
Based on expertise established in production of the Mitsubishi Jeep and development to improve it, this proprietary part-time 4WD system was then equipped in the Forte one-ton pickup truck in 1980, then in the Pajero in 1982. The system became the foundation of 4WD at Mitsubishi Motors, but although the 4WD at the time had outstanding traction on rough roads, there was room to improve its handling and everyday driving comfort. This included the problem of the tight corner braking phenomenon*1 that occurred on dry paved roads.
Then in 1986, a full-time 4WD incorporating a center differential gear was developed, delivering both road performance on dry paved surfaces—which had been an issue—and traction performance at the same time. This technology was built into the Mirage Wagon and Lancer Wagon, paving the way for passenger vehicles with 4WD to also become more widespread. Then, the Galant VR-4 released in 1987 was equipped with the Active Four integrated system that included 4WD and 4WS (four-wheel steering) among others. As the starting point of the AWC concept, it defined the new standards for Mitsubishi Motors 4WD development and shaped its further evolution.
-
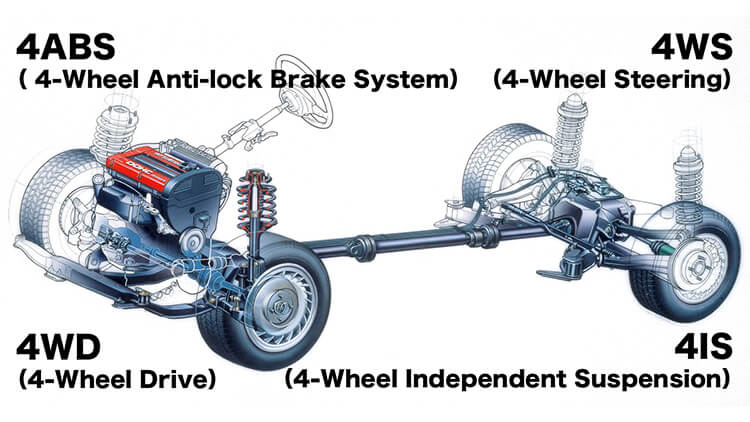
Active Four integrated system comprised of 4WD, 4WS, 4-wheel ABS, 4-wheel independent suspension (4IS)
-

Galant VR-4 with Active Four (1987)
Producing a car that wins races
Nakaya was involved in development in 1996 when the Lancer Evolution IV was active in motor sports competitions, including rally races in Japan and worldwide such as the World Rally Championship (WRC). The commercial model (GSR model) that was the base for the rally car came with Active Yaw Control (AYC).This technology was not the same as the conventional differential gear, which merely adjusted the rotation differences between the left and right sides. It was a revolutionary technology that improved cornering by causing a differential in driving force between the left and right wheels and transmitting greater force to the side opposite the turn.
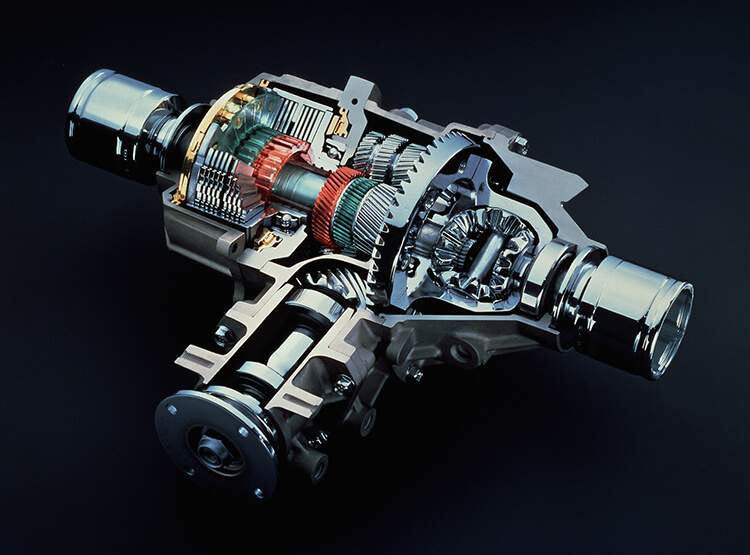
AYC installed in the Lancer Evolution IV
Nakaya reflects on his experience at the time, “It was an extremely novel concept. I remember being impressed by the fact that it could corner better than expected.. The technology was revolutionary.” He explained, “By varying the driving force to the left and right of the rear wheels, we were able to significantly improve cornering performance while taking advantage of traction.” Since heavy components such as the engine and transmission were concentrated in the front side of the vehicle in front wheel-based 4WD, it was hard to balance weight between the front and rear, which made cornering a challenge.
Measures were needed to address this. AYC took four-wheel control technology to a whole new level, which included better cornering by reducing the workload of the front wheels.
On the other hand, Nakaya also recalls his impression at the time that “Although the technology was excellent for commercial models, it was fraught with many issues such as durability when used for motor sports.” In fact, AYC was an option on the RS, the competition base car of the Lancer Evolution IV, but it was not used in actual competitions.

Lancer Evolution IV GSR, the first to be equipped with AYC
In the 1980s, 4WD cars supplanted rear-wheel drive as the mainstream in WRC, and the tarmac special stage (SS) became more common. Road performance on paved surfaces thus had to be improved. The Mitsubishi Motors rally car also transitioned from the rear-wheel drive Lancer EX to the 4WD Galant VR4, then in the 1990s to the Lancer Evolution, as Mitsubishi’s sights shifted from competing primarily on gravel to also aggressively entering tarmac rallies.
Reflecting on the challenge at the time, he continues, “Since it was getting tougher to compete using a design concept focused on gravel, I suggested various improvements based on the experience I had gained in circuit racing. That experience and the knowledge and technologies gained in rallies were mutually exclusive in some ways. However, I discussed things with the people in charge of development. We went through a daily process of trial and error with the aim of producing a ‘car that wins rallies’ and also a commercial model that utilizes those technologies.”
As a result, the Lancer Evolution V featured an extensive list of improvements and delivered commanding road performance. Its speed and high level of completeness earned broad recognition as it significantly improved on the best lap time of the previous model at the Tsukuba Circuit and repeatedly won showdown races organized by racing magazines, among other achievements. It was the model that came to symbolize Mitsubishi Motors four-wheel control technology.

The Lancer Evolution V which Nakaya was initially involved in developing
AYC became the primary means for achieving the precise handling and superior vehicle stability that Mitsubishi Motors sought. That technology would be further refined in motor sports and would evolve as a result. The aim was to give customers a car that anyone can feel reassured driving on any type of road. Nakaya continues to oversee the evolution of the technology, both as a participant in its development through motor sports and also as a journalist.
[Akihiko Nakaya]
He has been active as a racer and journalist since his university days. In 1985 he turned into a professional racer and won the opening race of the Mirage Cup. That same year, he drove a Mitsubishi Starion in the first ever Inter TEC race, which featured bruising competition between Group A vehicles. In 1988, he was the All-Japan F3 champion. He provided his advice from the standpoint of a racing driver, supporting the development of Lancer Evolution models V through X from behind the scenes. Driving Lancer Evolution cars, he recorded 50 victories and five full-year championships in Japanese endurance races "Super Taikyu Series“..
- :The phenomenon that occurs when a part-time 4WD vehicle corners sharply on a dry paved road with its 4WD directly engaged, and the vehicle behaves as if it is braking because it cannot compensate for the difference in rotational speeds between the front and rear wheels.