日常では環境に優しいEV走行、遠出はモーター主体のハイブリッド走行。そして、もしもの時には頼もしい電源に。
三菱自動車は地球温暖化や大気汚染などの環境問題に対応するため、早くから電気自動車(EV)の開発に取り組んできました。主にシティコミューターとして『アイ・ミーブ』『ミニキャブ・ミーブ』といったEVを発売してきましたが、さらに幅広い用途への期待に応えるためには、EVでは依然として航続距離や充電インフラといった課題が残ります。これに対する三菱自動車の答えがPHEVです。
日常の買い物や送迎、通勤などは主にEVで、休日のお出かけや旅行などの遠出はハイブリッドで走行することで充電の心配なく電動車ならではの走りを楽しめます。また、駆動用バッテリーに蓄えた電気は、キャンプやBBQなどのアウトドアレジャーや、停電などのもしもの時に非常用電力源として利用することができます。また、家庭ではV2H(Vehicle to Home)機器を介し電気を使用することもできます。いわば走る蓄電池であり、走行で環境問題に貢献するだけでなく、停車時もインフラの一部となり電力供給できるソーシャルグッドなモビリティです。三菱自動車はPHEVを中心とした環境対応技術で、持続可能な社会の実現に貢献していきます。
PHEVコンポーネント
車両の前後に2つの高出力モーターおよびジェネレーターを搭載、また大容量の駆動用バッテリーをフロア下へ搭載するなど、PHEV専用コンポーネントを車両の重量バランスに配慮しながらレイアウト。十分な乗員空間と荷室空間を確保しながら、低重心で優れた前後重量配分を実現。前後モーターのレスポンスに優れた力強い加速と相まって、市街地だけでなく、カーブが続く山間路など、どんな場面でも安定して走行することができます。
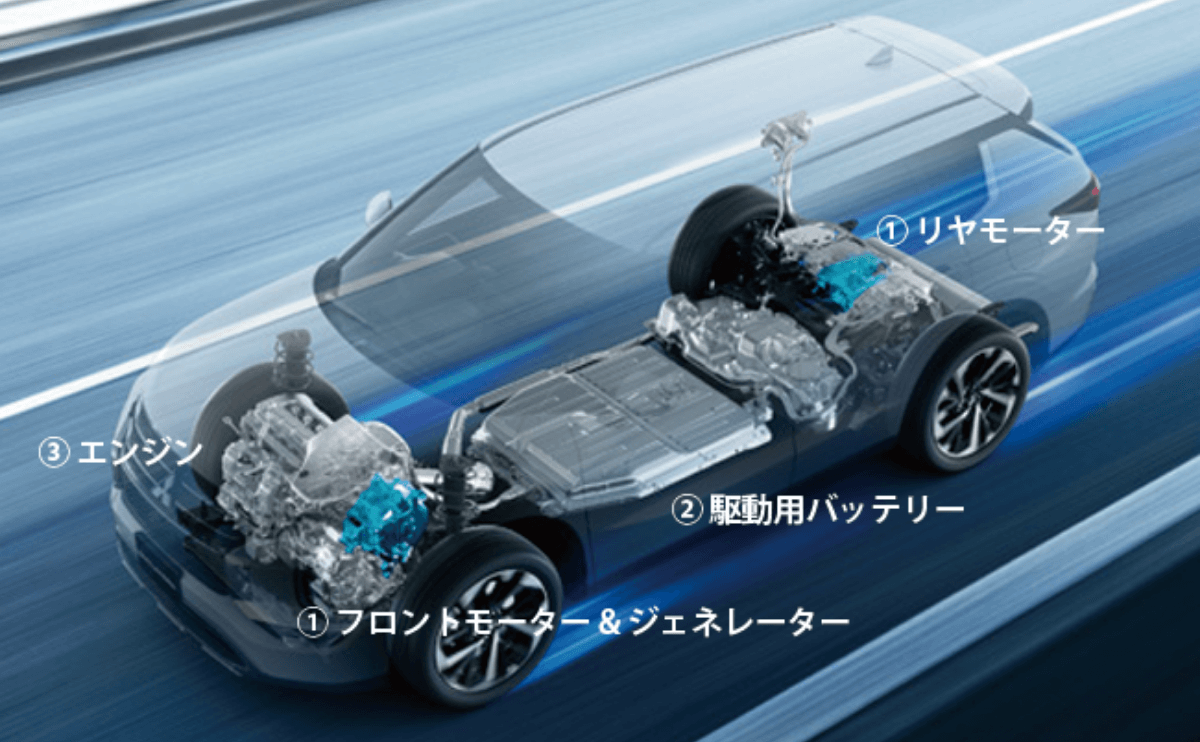
小型・軽量・高出力のモーターをフロントとリヤに一基ずつ搭載。レスポンスが良く力強い加速を実現する2つのモーターで4輪を駆動する、4WDとしています。フロントモーター・ジェネレーターは油冷式の採用により、冷却効率を高めてシステムの小型化・軽量化を実現。また、EV走行時の静粛性を損なわないよう、モーターノイズやEV部品の作動ノイズを低減しました。
PHEVシステム用として開発されたリチウムイオン電池を採用。計96個の電池セルを直列接続して、総電圧350V、総電力量20kWhの大容量駆動用バッテリーを構成し、強固なフレーム構造で囲まれた電池パック内に収納。高い防水性を確保するためバッテリーパックを密閉構造化するとともに、バッテリーパックをボディフレームの一部として組み込むことでバッテリーの損傷を防止し、さら車両全体の強度・剛性も向上させています。
シリーズ走行モードでは発電用として、パラレル走行モードでは主に駆動用として用いられます。カムプロフィールの変更とバルブタイミング制御により高膨張⽐サイクル(アトキンソンサイクル)とすることで、低回転域で効率のよい発電を可能としました。また、エンジンから発生する音を大幅に低減させることで、発電によるエンジン稼働時でもEVらしいモーター駆動が生み出す気持ちよい静かな走りを実現しています。
ツインモーター4WDとS -AWCによる先進の走行性能
前後輪をそれぞれ独立したモーターで駆動する「ツインモーター4WD」
前後の独立したモーターにより、優れたレスポンスを生かして走行状況やドライバー操作に合わせて瞬時に前後のトルク配分を変えられます。それにより車両の走行安定性を高め、意のままのコントロールを可能とし、様々な路面状況において安心で快適な運転を支えます。
『アウトランダー』PHEVモデルでは、前後に搭載したモーターの最高出力を前85kW/後100kWに高めることで、前後輪それぞれの駆動力をアップ。これにより、前輪と後輪へ振り分ける駆動力配分をさらに自在に変えることが可能になり、様々な天候や路面に対応する走行性能が大幅に向上しました。
車両運動統合制御システム「S-AWC(Super All Wheel Control)」
「ツインモーター4WD」をベースに、アクティブスタビリティコントロール「ASC」や「ABS」に加え、ブレーキによる左右の駆動力を制御するアクティブヨーコントロール「AYC」を統合制御した高度なシステムです。
前後独立のツインモーターを活用することで、前後車輪の物理的な拘束から解放され、三菱自動車が理想とする最適解 “理想前後駆動力配分”の実現が可能となり、“誰もが安心して楽しめる走りを実現しています。
『アウトランダー』PHEVモデルでは、これまでは前輪だけで行っていた「AYC」のブレーキ制御を後輪でも行うことで四輪に分散制御。これにより、タイヤ一輪あたりの制動力を小さくできるため、滑りやすい路面でより「AYC」の効果をより発揮させることが可能になりました。
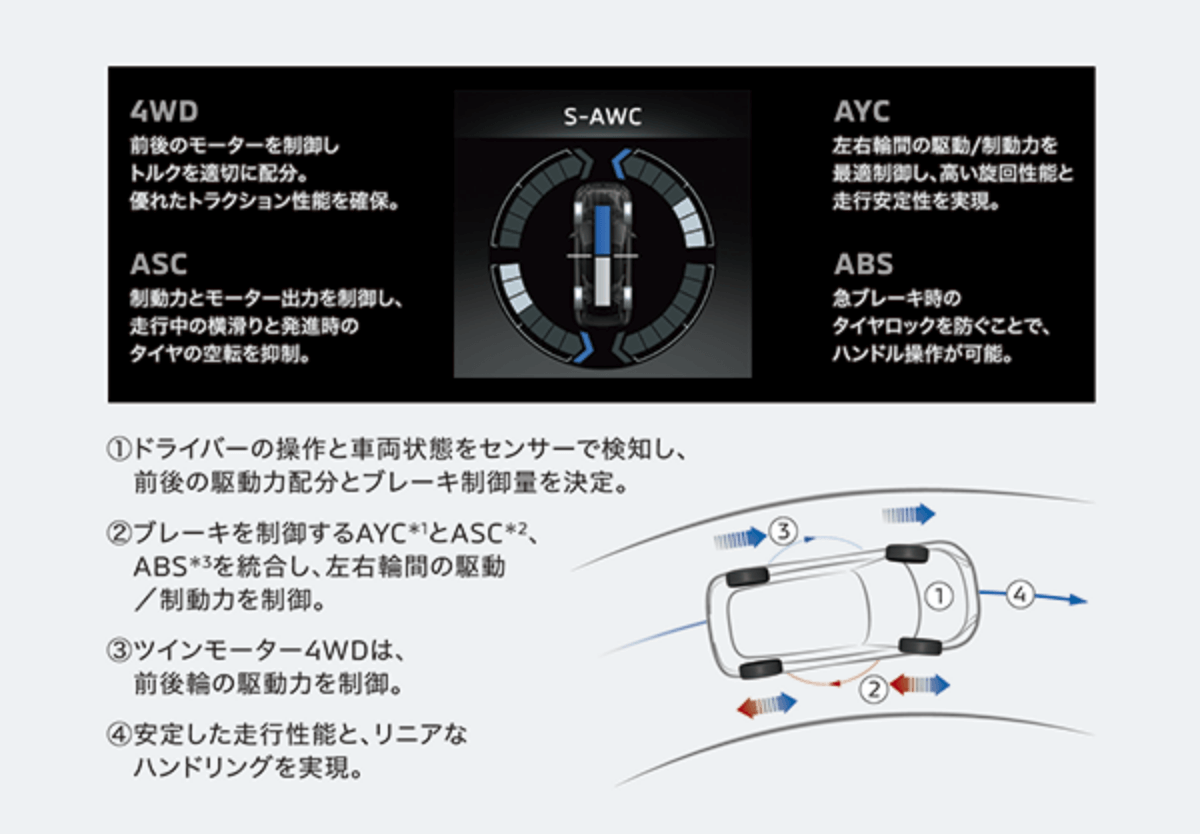
- * 1:AYC=Active Yaw Control ブレーキを制御することで、車両に働くヨーモーメントを最適に制御し、高い旋回性能と走行安定性を実現します。
- * 2:ASC=Active Stability Control ブレーキとモーターを制御することで、姿勢の乱れを抑制しクルマの安定性を確保します(スタビリティコントロール機能)。また、滑りやすい路面で発進する際、車輪のスリップを防ぎ、発進・加速をサポートします(トラクションコントロール機能)。
- * 3:ABS=Anti-lock Brake System 滑りやすい路面や高速走行中の急ブレーキで、ブレーキを制御し、タイヤのロックによって起こりやすい横滑りを防ぎ、安定した車体姿勢の確保、ハンドル操作による障害物の回避を容易にするブレーキシステムです。